摘 要: 在焊接机器人柔性加工单元应用中,为保证焊枪与焊缝在弧焊过程中始终处于接头成型良好的焊接位置,需要机器人和变位机协调运动. ACADOLP弧焊离线编程系统实现了协调运动,阐述了该系统中的协调运动的算法原理. 将协调运动分解为协调直线运动和协调圆弧运动,并给出了一种实现系统协调运动功能的方法,即变位机作为主手,机器人为从手,机器人跟踪变位机进行运动,实验验证了这种方法的可行性.
关键词: 机器人; 离线编程; 弧焊; 协调运动
由于弧焊的特殊性,机器人弧焊系统正由单机器人向机器人柔性加工单元和机器人柔性生产线发展. 与单机器人焊接最本质的区别,弧焊机器人柔性加工单元或工作站能够通过空间协调更有效地实现空间运动,保证焊枪与焊缝在弧焊过程中始终处于接头成型良好的焊接位置. 离线编程系统作为机器人编程的一种方式,极大地提高了机器人的编程效率[ 1 ] . 国外的离线编程系统如Igrip等也实现了系统协调运动的仿真,但对于复杂工作单元的协调运动往往不能实现[ 2 ] . 国内的一些科研院所在离线编程技术上进行了很多的研究,并开发了一些离线编程系统,但这些系统都处于单机仿真状态,没有实现协调运动. 哈尔滨工业大学焊接实验室自主开发了一套机器人弧焊离
线编程与仿真系统———ACADOLP[ 3, 4 ] . 本文对该系统中的协调运动进行了研究.
1 协调运动系统的定义
在协调加工单元中,机器人连续弧焊作业时,焊枪末端总是跟踪焊缝不断运动,根据笛卡尔空间的齐次变换描述,这种运动可由如下矩阵方程表示:

式中: W rob - base为弧焊机器人基坐标相对于参考坐标系的位姿变换矩阵; Rrob(t)为焊枪坐标系相对机器人基坐标系的位姿齐次变换矩阵;W pos.base 为变位机基坐标系相对于参考坐标系的位姿变换矩阵;P pos(t)为变位机工作台固定坐标系相对于其基坐标系的齐次变换矩阵; Dpart 为被焊目标点相对变位机的工作台固定坐标系的齐次变换矩阵. 方程左边的矩阵描述弧焊机器人末端焊枪的空间位置和姿态,而方程右边的矩阵描述工件被焊点的位置和姿态. 对于任何协调运动工作单元,其都可被抽象为参考坐标系、机器人基坐标系、变位机基坐标系、变位机动坐标系来表示. 从工业机器人的控制及轨迹规划方式看,不论机器人所走的轨迹多么复杂,其构成轨迹的线型要素只有两种:直线和圆弧. 通过这两种基本线型的组合,构成各种复杂的轨迹. 协调直线和协调圆弧算法相似,下面以机器人和变位机组合为例,对协调圆弧算法进行介绍. 2 协调圆弧算法原理 空间任意3点确定一个圆,因此,从机器人协调圆弧功能实现的角度来讲,初始条件至少要有空间的3个点. 如图1所示,圆弧轨迹上的运动可以描述为   空间协调圆弧轨迹的实现算法原理可以概括为:获取空间圆弧在起始形位、中间过渡形位、结束形位的位置信息,利用相邻的3个形位的位置信息求解得到圆弧轨迹在各自圆心坐标系(工件坐标系)中的参数方程,然后以此为条件,进行空间圆弧轨迹规划,最后以变位机为主手,机器人为从手,控制变位机以给定速度调整被焊工件的姿态,根据机器人与变位机之间的相对坐标关系实时控制机器人跟踪变位机运动,从而实现圆弧协调运动. 在具体实现过程中, 为了尽量消除示教过程中的误差影响,对于多点( > 3) 协调示教,采取分段计算的办法. 如图2所示, 假设某圆弧上示教了n个形位:D15、D5、D35、D45、....、Dn5 , 那么在实现圆弧轨迹过程中将分为n - 2段进行,第一段由前3个形位确定, 第二段由D25、D35、D45确定, 以此类推,...,第n - 2段由Dn-25、Dn-15 、Dn5确定. 空间协调圆弧轨迹的实现算法原理可以概括为:获取空间圆弧在起始形位、中间过渡形位、结束形位的位置信息,利用相邻的3个形位的位置信息求解得到圆弧轨迹在各自圆心坐标系(工件坐标系)中的参数方程,然后以此为条件,进行空间圆弧轨迹规划,最后以变位机为主手,机器人为从手,控制变位机以给定速度调整被焊工件的姿态,根据机器人与变位机之间的相对坐标关系实时控制机器人跟踪变位机运动,从而实现圆弧协调运动. 在具体实现过程中, 为了尽量消除示教过程中的误差影响,对于多点( > 3) 协调示教,采取分段计算的办法. 如图2所示, 假设某圆弧上示教了n个形位:D15、D5、D35、D45、....、Dn5 , 那么在实现圆弧轨迹过程中将分为n - 2段进行,第一段由前3个形位确定, 第二段由D25、D35、D45确定, 以此类推,...,第n - 2段由Dn-25、Dn-15 、Dn5确定.
3 协调运动的仿真实现
本文采用了示教关键点,进行协调运动的差补计算,然后仿真再现实现协调运动的仿真功能.最后本文给出了机器人和变位机,机器人和导轨协调运动仿真画面.为方便用户操作,开发了一个类似于实际示教盒的屏幕示教盒. 该示教盒可实现关节运动功能,机器人末端沿设备坐标系各坐标轴的平移,机器人末端沿工具坐标系各坐标轴的旋转. 图形环境下的示教与机器人实际工作环境中的示教方式相比,屏幕示教并不存在效率低的问题.
本系统仍然沿用文献[ 3 ]的标签点定义. 但是考虑到传统的标签点只是记录工具坐标系的位姿,而在示教协调运动过程中,对于每一个示教好的标签点,不但要记录工具坐标系的位姿,还要记录此时各辅助轴的关节角值,才能完整重现焊枪在该点姿态. 因此,为方便用户使用,本系统在示教盒中增加了标签点设置辅助轴的功能. 利用标签点来记录每个示教点对应的辅助轴的关节角值. 此外用户还可以编辑修改辅助轴关节角值.
采用上述方法,对协调圆弧运动进行仿真,示教点数为5点. 分别对标签点1, 5设置辅助轴关节角值- 200 mm, - 20°, 0°; 200 mm, 20°, - 90°.机器人弧焊单元是哈尔滨工业大焊接实验室自主开发的九自由度弧焊机器人单元,如图3所示.
在世界坐标系空间中,机器人末端轨迹是一连续非封闭的曲线,如图4所示. 根据圆弧协调算法,将机器人末端轨迹变换到变位机基坐标系中,在变位机基坐标系空间中观察机器人末端运动,圆弧轨迹如图5所示.
4 协调运动应用
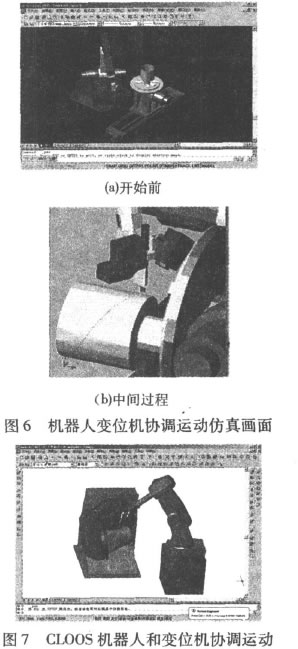
焊接变位机是改变焊缝位置的重要设备,焊接变位机和机器人的协调工作可实现焊接工艺焊接位姿的要求. 图6为机器人和旋倾变位机协调工作,实现等速螺旋线焊缝船形焊的仿真画面.该画面中的机器人弧焊单元如图3所示.
对于CLOOS机器人和L型变位机组成的工作单元,利用本文的方法也实现了协调运动仿真,如图7所示.
通过示教重现的方法可以实现扩展轴不超过6个的机器人工作单元的协调运动仿真.
5 结 论
本文采用了屏幕示教,差补计算的方法实现了系统的协调运动,并对该部分结果进行了实验验证,较好地解决了离线编程系统中机器人柔性加工单元的协调运动问题.
|
